Piezoelectric Waveguiding
Metasurface consisting of a piezoelectric transducer bonded to a thin metal substrate material. The transducer has inherent electromechanical coupling between strain and charge, facilitating the transfer of energy from elastic vibrations to electric voltages. Since these transducers are dielectric and thus behave as electrical capacitors, connecting a synthesized inductive load enables the implementation and continuous tuning of this spatially localized LC-resonance. The system is described in the figure below:
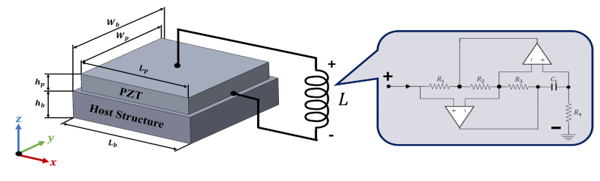
Figure 1. (a) Unimorph piezoelectric unit cell bonded to a host structure (plate) with an inductive shunt. (b) Semi-active synthetic inductance circuit known as the Antoniou Gyrator used to realize the tunable inductance.
Due to the locally resonant electromechanical coupling, altering the electrical characteristics (inductance value) changes the effective stiffness of the unit cell. This change in stiffness can be used to speed up or slow down elastic wave propagation (dispersion), such that adjacent unit cells with different electrical tunings results in a local phase shift of the propagating wavefront.
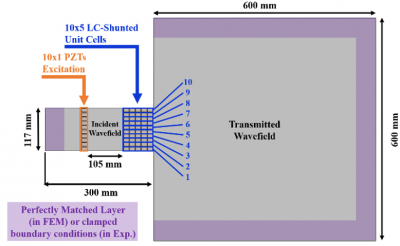
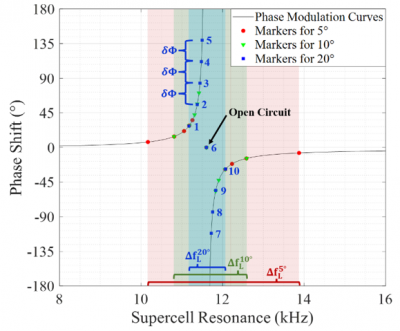
Figure 2. Configuration of LRPM in the finite element model (or experiment). (a) finite element model (or experimental testbed) (b) Analytical phase modulation curve for piezoelectric unit cell. Markers indicate the resonances needed to obtain phase gradients of δΦ=7.1° (for θ_t=5°), δΦ=14.2° (for θ_t=10°), and δΦ=27.9° (for θ_t=20°) between neighboring supercells. The markers progress from the left to the right, corresponding to each row of unit cells (supercell) starting from the bottom and working upwards.
An elastic waveguide can then be created through a gradient of these phase shifts (similar in principle to phased-array-radar) to redirect and steer incident waves in a target direction. These design process, specifying local phase shifts across a piezoelectric metasurface boundary is illustrated in Figure 2 above. With this design completed we test the configuration in COMSOL Multiphysics.
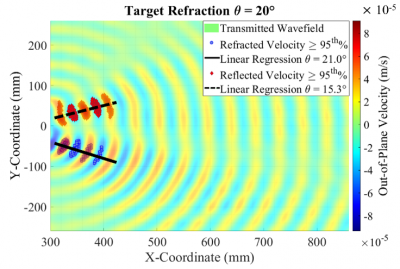
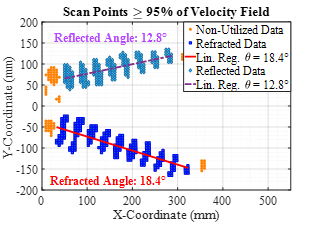
Figure 3. FEA simulations for several phase modulations. (a) 20° refraction COMSOL Wavefield
(b) Linear regression is performed in the near field for refraction angle evaluations.
Following this design and validation, we implemented the elastic waveguide through comprehensive experimental testbed. We synthetized the tunable synthetic inductors using TL082IP Operational amplifiers, updated both the analytical & COMSOL parameters to match the experimental testbed, and tuned the metasurface for various configurations. These are summarized in the videos below for the metasurface above with an incident elastic wave of 11.6 kHz:
Natural Response (No Shunt Circuitry)
Targeted Vibration Suppression (LC-Resonators Tuned to Match 11.6 kHz Excitation)
5° Targeted Refraction Via Phase-Gradient Design
20° Targeted Refraction Via Phase-Gradient Design
To investigate the uncertainty and variations discovered in the experiment, we conducted a Monte-Carlo Analysis to understand the effect of varying local effective material properties due to the manufacturing tolerances, local surface-bonding quality, and individual transducer degradation. Over a period of several days we measured and estimated the tolerance of three fundamental properties of each piezoelectric transducer.
| Parameter | Unit | Average | Std. Dev. |
| Local Resonance | Hz | Variable | 45 |
| Piezo Coupling | m/V | -119 x 10-12 | 7.4 |
| Shunt Resistance | Ω | 20 | 11 |
Utilizing COMSOL Multiphysics and MATLAB Livelink, the FEA simulation earlier were iterated across several hundred iterations of material property variations between each unit cell. The resulting refraction angle was measured for each case, leading to the specification of an uncertainty distribution for the realized refraction angle in experimental implementation. We first examined the case of a 20° angle of refraction and perturbed one parameter at a time across the metasurface array. Revealing the waveguiding sensitivity to variations in each fundamental parameter. See Figure 4.
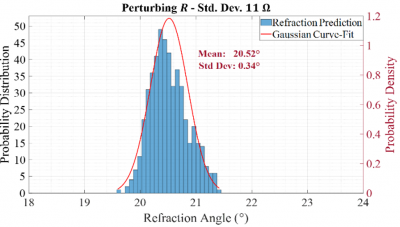
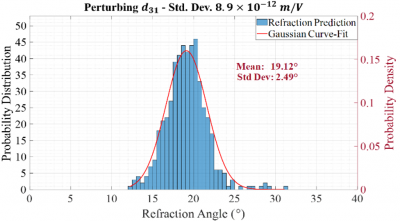
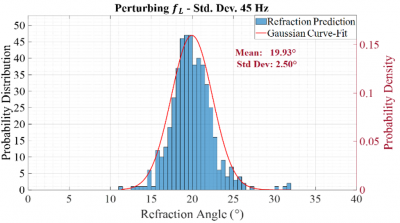
Figure 4. Simulation results for waveguiding uncertainty. 500 sets of unit cell perturbations on (a) local resonance frequency f_L, (b) electromechanical constant d_31, and (c) shunt resistance R.
Finally, we looked to the cumulative effect of uncertainty, varying all three fundamental parameters simultaneously and recording the effect on the realized refraction angle. This was performed for three targeted refraction angles, which revealed increased sensitivity to material uncertainties as the refraction angle is increased. Additionally, we examined the width and depth of realized transmission bandgaps for targeted vibration suppression. In this final case, all the unit cells are tuned to match the 11.6 kHz incident frequency, then perturbed via Latin Hypercube Sampling for all three fundamental parameters. These results are illustrated in Figure 5.
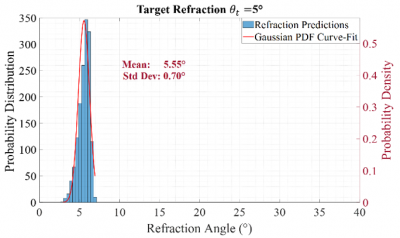
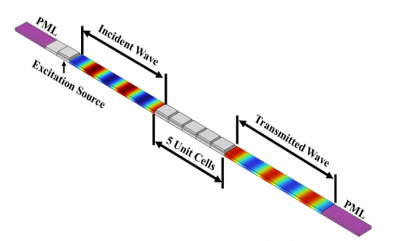
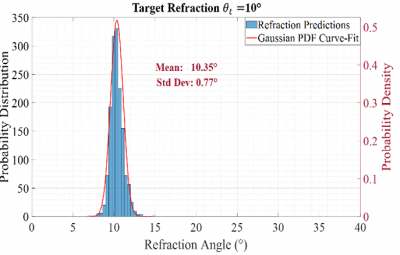
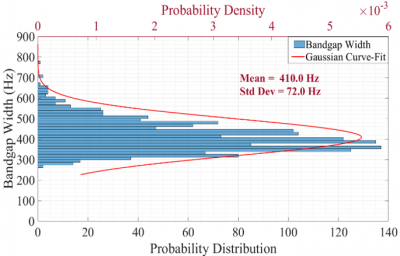
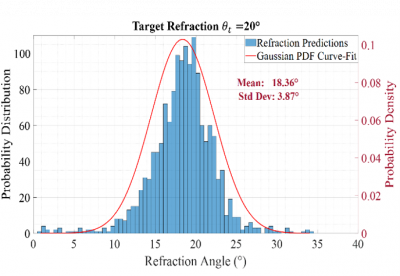
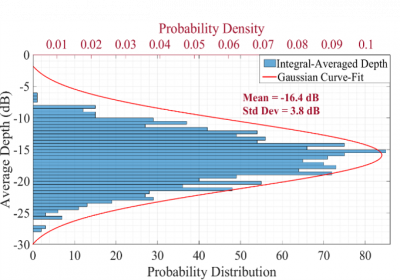
Figure 5. Simulation results for waveguiding uncertainty. 1500 unit cell perturbations of local resonance f_L, electromechanical constant d_31, shunt resistance R. (a) Refraction performance under uncertainty for a 5° target angle. (b) Simulation schematic illustrating the process used for bandgap uncertainty analysis. (c) Refraction performance under uncertainty for a 10° target angle. (d) Distribution of bandgap width measured at -3 dB transmission cutoffs. (e) Refraction performance under uncertainty for a 20° target angle. (f) Distribution of integral-averaged bandgap depth.
Time-Modulated RLC Shunted Piezoelectric Metamaterial for Multiband Vibration Control
Advanced vibration control is essential in lightweight structural systems where unwanted elastic waves can reduce performance, cause structural fatigue, and compromise reliability. Traditional passive damping techniques often provide limited bandwidth control and lack adaptability. Piezoelectric metamaterials offer an alternative approach by coupling mechanical vibrations with electrical circuits, enabling tunable and frequency-selective energy manipulation without adding significant mass or complexity. This project explores a time-modulated RLC-shunted piezoelectric metamaterial designed to achieve multiband vibration isolation and asymmetric wave control.
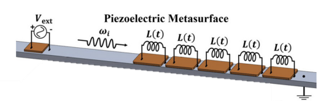
The system consists of an aluminum beam (400 mm × 11 mm × 2 mm) with surface-bonded PZT patches (14 mm × 10 mm × 1.5 mm), where one patch provides excitation and five patches act as isolation units. Each unit cell is connected to an RLC shunt circuit with a 20 Ω resistor and an inductance tuned to achieve a 12 kHz local resonance (L ≈ 0.0374 H). Using the electromechanical coupling coefficient d31 =−1.19×10^−10 C/N, the model captures the feedback mechanism in which electrical dynamics modify mechanical stiffness and energy flow.
Dispersion analysis using Floquet periodic boundary conditions confirms the formation of an electromechanical bandgap at resonance, establishing a frequency region where wave propagation is prohibited. Frequency-domain simulations (9.5–14.5 kHz sweep) validate sharp transmission dips at 12 kHz, confirming proper tuning of the shunted system. The study is then extended to a time-dependent case, where the inductance is sinusoidally modulated at 1100 Hz (~10% modulation factor), producing multiband attenuation and sideband frequencies. Time-domain velocity analysis demonstrates strong suppression at the carrier frequency (12 kHz) and upper sidebands, while lower sidebands exhibit asymmetric behavior.
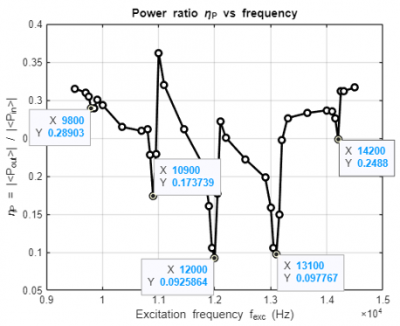
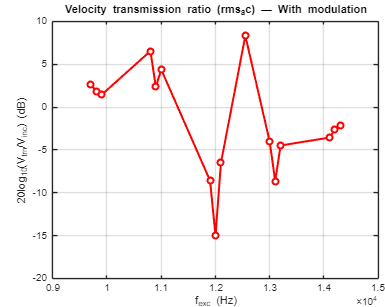
To accurately quantify energy transfer, a mechanical power flux study is performed by integrating stress and velocity across incident and transmitted beam cross-sections. Results show pronounced attenuation at the main resonance and first-order sidebands, confirming multiband isolation and asymmetric energy redistribution. Theoretical impedance analysis further explains the asymmetry between upper and lower sidebands, demonstrating how time-modulated electrical impedance introduces frequency-dependent stiffness and damping effects. Overall, this work validates the feasibility of time-modulated shunted metamaterials for tunable, frequency-selective vibration suppression in lightweight structural systems.
Mechatronics Synthesis: Adaptive Piezoelectric Impedance Sensor
Structural Health Monitoring (SHM) refers to the process of near-real-time detection and identification of structural faults by measuring the dynamic characteristics and conducting inverse analysis. Among the array of SHM techniques, piezoelectric impedance-based approaches are promising. These methods utilize high-frequency interrogation to detect small incipient damage based on the two-way electromechanical coupling effect of piezoelectric transducer embedded in the host structure. The piezoelectric transducer serves as the sensor and actuator simultaneously, which can excite the host structure by applying frequency-sweeping harmonic voltage while collecting frequency response measurements. The change of the piezoelectric impedance signature due to damage can be used as the damage indicator. As frequency-sweeping harmonic responses are measured, this technique is less prone to transient noise effects. By comparing the piezoelectric impedance measurements under structural damage with those obtained from a reliable baseline model under healthy status, the location and severity of damage can be identified through inverse analysis. One major challenge is that, as impedance changes are most noticeable only around structural resonant peaks, the amount of impedance measurement data is generally limited. As a result, the inverse problem for damage identification is often underdetermined. Indeed, just as in human healthcare diagnostics, where an increase in testing leads to a broader evidence base and consequently narrows the diagnostic spectrum, so too does the accumulation of data refine the scope of structural damage identification. In such situations, the inverse analysis objective is to pursue a small solution set encompassing the actual damage scenario. Once that is achieved, the maintenance would only need to concentrate on these specific, small solution sets, greatly reducing maintenance costs. Toward this goal, the enrichment of measurement data is essential.
In this research, a new methodology of tunable sensing is established. Taking advantage of the two-way electromechanical coupling of piezoelectric transducers, tunable inductance is integrated into the measurement circuit. Upon this tuning, frequency veering occurs when the system exhibits a response where the resonance frequency appears to split or veer into two distinct peaks. This behavior can be indicative of a change in the dynamic properties of a system and is used in this study to enhance the sensitivity of damage detection methods by amplifying the changes in admittance that are associated with damage. For the same damage scenario, by tuning the inductance to a series of values, a family of impedance measurements can be acquired. It is validated from experimental tests that the new methodology with enriched measurement can produce a smaller solution set encompassing the true damage scenario, thereby providing vital information for diagnoses and prognosis.
Swarm-based Multi-Agent Optimization with Reinforcement Learning
In many engineering cases, the detection of damage occurrence is important, ultimately the identification of location and severity of damage can provide vital information toward operation and maintenance of the structure as well as its remaining useful life prediction. From the viewpoint of a structure being continuum, structural damage is characterized by continuous variables, exhibiting in theory infinitely many possible damage scenarios. In finite element model-based damage identification, a structure is divided into a large number of segments. Each segment may be subject to damage which induces local property change, e.g., stiffness reduction. Nevertheless, an intrinsic difficulty in damage identification is that the amount of useful information acquired from measurement is generally limited, oftentimes rendering the inverse analysis under-determined. Thus, the inverse analysis cannot be solved with direct matrix inversion. Under the umbrella of optimization-based inverse analysis, there is a different school of thought being explored, i.e., utilizing multi-objective optimization. From a computational standpoint, a multi-objective optimization naturally avoids the ad hoc selection of weightings between different objectives used in a single-objective optimization. Meanwhile it can yield multiple solutions fitting the nature of underdetermined problem. Indeed, SHM is analogous to human healthcare in many ways, including that the diagnostics practice is oftentimes under-determined. Essentially, when the measurement information is limited, one would be satisfied if the inverse analysis can produce a small set of solutions, i.e., possible damage scenarios, that encompass the true damage scenario. If all these solutions point to insignificant damage, continuing operation of the structure can be recommended. Otherwise, additional measurements using different sensing techniques including human inspection can be dispatched to further investigate this small set of possible damage scenarios. Seeking a small set of solutions that include the true damage scenario is especially relevant for piezoelectric impedance based active interrogation.
Targeting at this goal, in our research we aim at the establishment of a new sparsity conscious multi-objective optimization framework that can fully unleash the capability of piezoelectric impedance measurement for damage identification. We develop a swarm-based framework that explores the solution space through sparsity-aware initialization and adaptive local refinements. Each particle is regarded as an agent, equipped with multiple strategies, and guided by a Q-learning policy to make context-aware decisions. This agentic mechanism enhances collective intelligence, driving the swarm toward diverse and reliable solutions that capture the true scenario.
Knowledge-Grounded Large Language Model for Industrial Applications
In the era of Industry 4.0 and large-scale AI deployment, industries face a critical challenge: while massive datasets drive many AI breakthroughs, specialized industrial domains often struggle with limited labeled data and underutilized textual knowledge resources. Technical documentation, maintenance manuals, and domain expertise remain largely untapped, while collecting verified defect samples in industrial settings is both costly and time-consuming. This data scarcity particularly affects critical infrastructure monitoring, where rare failure modes and evolving damage patterns make traditional supervised learning approaches inadequate.
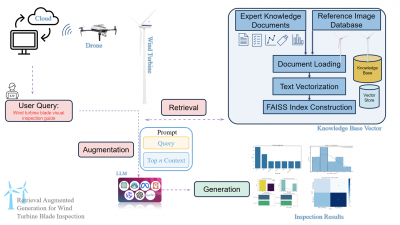
Wind energy exemplifies this challenge perfectly. As wind capacity rapidly expands globally, turbine blades face harsh environmental conditions including UV radiation, hail, lightning strikes, and temperature variations, resulting in diverse damage patterns such as leading-edge erosion, surface cracks, and delamination. Traditional inspection methods, while reliable, are often contact-based and require turbine shutdown. Vision-based drone inspection offers a promising alternative with its non-contact nature and full-surface coverage, but existing deep learning approaches depend heavily on large labeled datasets that are difficult to obtain for rare damage types.
To address these challenges, we propose a towards zero-shot framework that integrates Retrieval-Augmented Generation (RAG) with Vision-Language Models (VLM), constructing a multimodal knowledge base from technical documentation and reference images. This approach eliminates the need for extensive labeled datasets while providing explainable reasoning grounded in domain knowledge, offering a data-efficient solution for industrial inspection that extends beyond wind turbine applications to other industrial monitoring scenarios.
Real-Time Hybrid Twin Simulation
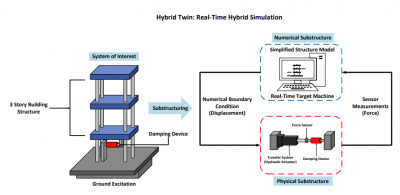
Real-Time Hybrid Simulation (RTHS) serves as a powerful testing framework for assessing complex systems that contain nonlinear or difficult-to-model components. By partitioning a large system into numerical and physical substructures, RTHS offers a cost-effective middle ground between purely digital simulations and full-scale experimental testing. The primary technical hurdle in this approach is time delay, which is typically introduced by the transfer system, the interface responsible for translating numerical commands into physical hardware movements. If not managed, this latency can lead to inaccuracies or instability, making synchronization a necessity of successful RTHS execution.
This research applies this methodology by coupling a 3-story frame structure (the numerical substructure) with a magnetorheological (MR) damper (the physical substructure). The MR damper is an ideal candidate for physical testing due to its complex, hysteretic behavior, which is notoriously difficult to capture accurately in a computer model. By integrating the physical damper with a virtual frame, I can analyze damping effects across various hardware designs and control algorithms under realistic loading conditions. This setup allows for rapid, iterative experimentation, ensuring that the damping strategies are both robust and effective before moving to full-scale deployment.

Validating complex systems often forces engineers to choose between the high cost of full-scale experiments and the potential inaccuracies of purely digital models. Real-Time Hybrid Simulation (RTHS) bridges this gap by integrating physical hardware with numerical models in a single, closed-loop test. This cyber-physical approach allows researchers to isolate critical, nonlinear components for physical testing while simulating the rest of the structure computationally. While this method is well established for low frequency seismic applications, extending it to mechanical shock and high frequency vibration presents unique challenges. The primary technical hurdles in this domain are system time delay and Control-Structure Interaction (CSI), a dynamic interaction where the actuator’s force output capacity significantly diminishes at the system's resonant frequencies. Both of these challenges compromise simulation fidelity. This research addresses these challenges by developing an RTHS framework specifically for mechanical shock applications using electrodynamic shakers. Unlike the hydraulic actuators typically used in civil and mechanical engineering, electrodynamic shakers can achieve the high frequencies necessary for shock testing but are prone to severe control-structure interaction issues. By coupling numerical models of mechanical systems with physical components mounted on a shaker, we can validate advanced control strategies, such as Iterative Feedforward Control, to compensate for CSI and system time delay. This work aims to establish shakers as reliable transfer systems for RTHS, enabling accurate, cost-effective testing of components under realistic shock environments.
Digital Twin: Condition Monitoring and Diagnosis of Gear Transmission

Gear systems are critical components that are used extensively in several industrial applications, motivating predictive maintenance techniques to reduce failure. Conventional gear condition monitoring and diagnosis is performed through vibration analysis of the transmission during regular operation. This method utilizes non-invasive accelerometers to measure periodic signals associated with the operation of the gearbox and extracts condition indicators through statistical or data driven methods. A significant challenge to utilizing this approach is that the condition indicators within the vibration data are contained within different time/length scales and are obfuscated by measurement noise. As a result, preprocessing is needed to prepare the signal for analysis. Another challenge this approach encounters is the scarcity of fault condition data available for analysis both due to the rarity of certain faults and the vibration response being dependent on the operating condition of the system. Thus, the development of many data driven approaches is stalled by a lack of available training data. Consequently, the need to standardize vibration data and create additional data under fault conditions is realized. Once vibration data is standardized and sufficient examples of fault vibrations are available, the cost to develop automated gear monitoring and diagnosis algorithms is greatly reduced.



In this project, methods for standardizing and enriching gear vibration data under various operating conditions are investigated. A lumped parameter model of a representative gear transmission is developed and validated against a reference testbed. The model is then used to enable several research objectives. First, model updating based on the vibration signal obtained from the reference testbed is utilized to realize a digital twin of the system capable of replicating the vibration response under several conditions. Using this, methods for vibration signal standardization, fault vibration signal generation, and condition extraction are developed. This enables the development of data driven approaches which can realize condition monitoring and diagnosis requirements for real world usage.
Intelligent Fault Diagnosis of Rotating Machinery Using Deep Learning
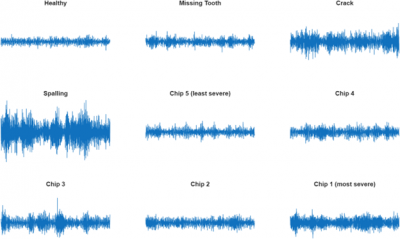
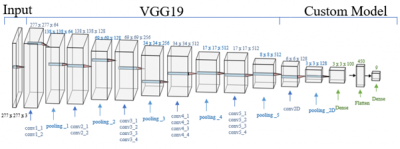
Rotating machinery such as gearboxes and bearings are integral to many aspects of modern life, including vehicles and wind turbines. As these systems operate, they produce vibration signals that contain valuable information about their operating condition. A gearbox with a broken tooth, for example, will operate less smoothly than a healthy one, creating noticeable differences in its vibration response. While some faults are visually obvious in the signal, others are far more subtle yet equally problematic. Diagnosis involves classifying these vibration patterns under specific health conditions, and Artificial Intelligence (AI) can be leveraged to assist in this process. Machine Learning (ML) enables a computer to perform specific classification tasks with minimal human intervention. Convolutional Neural Networks (CNNs), widely used in image recognition, form the foundation of this approach. A typical CNN begins with an input image, followed by convolutional layers that apply multiple filters to extract features, additional layers that further process and scale down the data, and a final classification layer that assigns probabilities across multiple classes (for example, a 1×10 output representing ten possible conditions). However, since vibration data is inherently one-dimensional, it must first be converted into an image representation before being processed by a CNN. To accomplish this, continuous wavelet transforms (CWT) are used to convert 1D vibration signals into time–frequency images. The CWT provides localized time-frequency analysis using a selected wavelet shape, such as the Morlet wavelet, and demonstrates the inverse relationship between scale and frequency. Although CNNs typically require large datasets for effective training, vibration datasets are often limited. To address this, Transfer Learning (TL) is applied by first training a model on a large dataset to learn general pattern recognition features and then adding additional layers to adapt the model specifically to vibration-based fault classification